Electronics
This robot uses the Nucleo STML476RG microcontroller as the brains of the operation. The Nucleo is plugged into a “Shoe of Brian” which is an add-on board that was designed specifically for this class. The Shoe of Brian allows us to write code for the Nucleo in micropython instead of it’s native language, C.
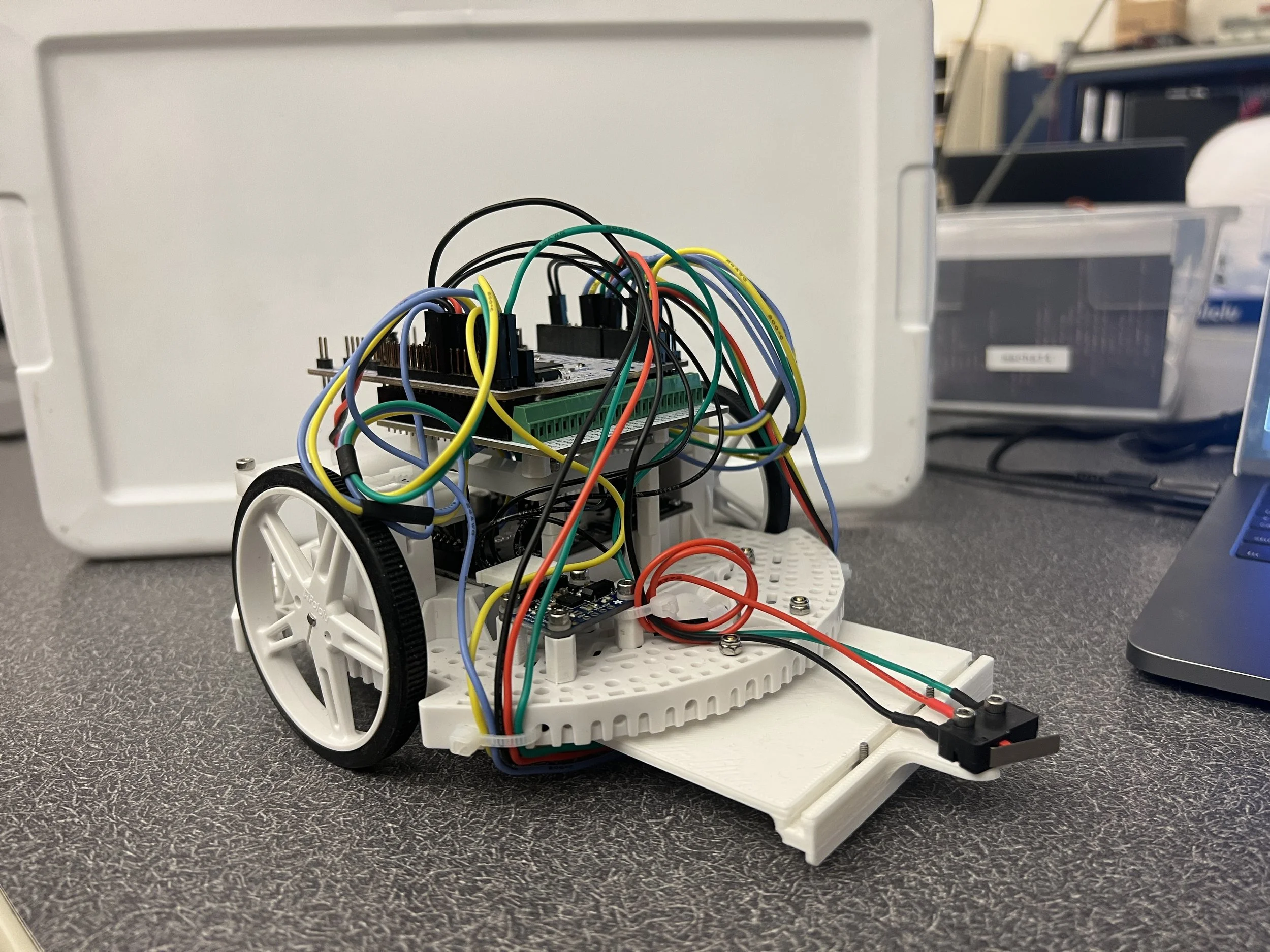
The Nucleo interfaces with multiple peripheral devices which allow our robot to interact with its environment. The peripherals that we used are included in the electronics components list shown to the left. (Click on the component name to be taken to the component’s product page.)
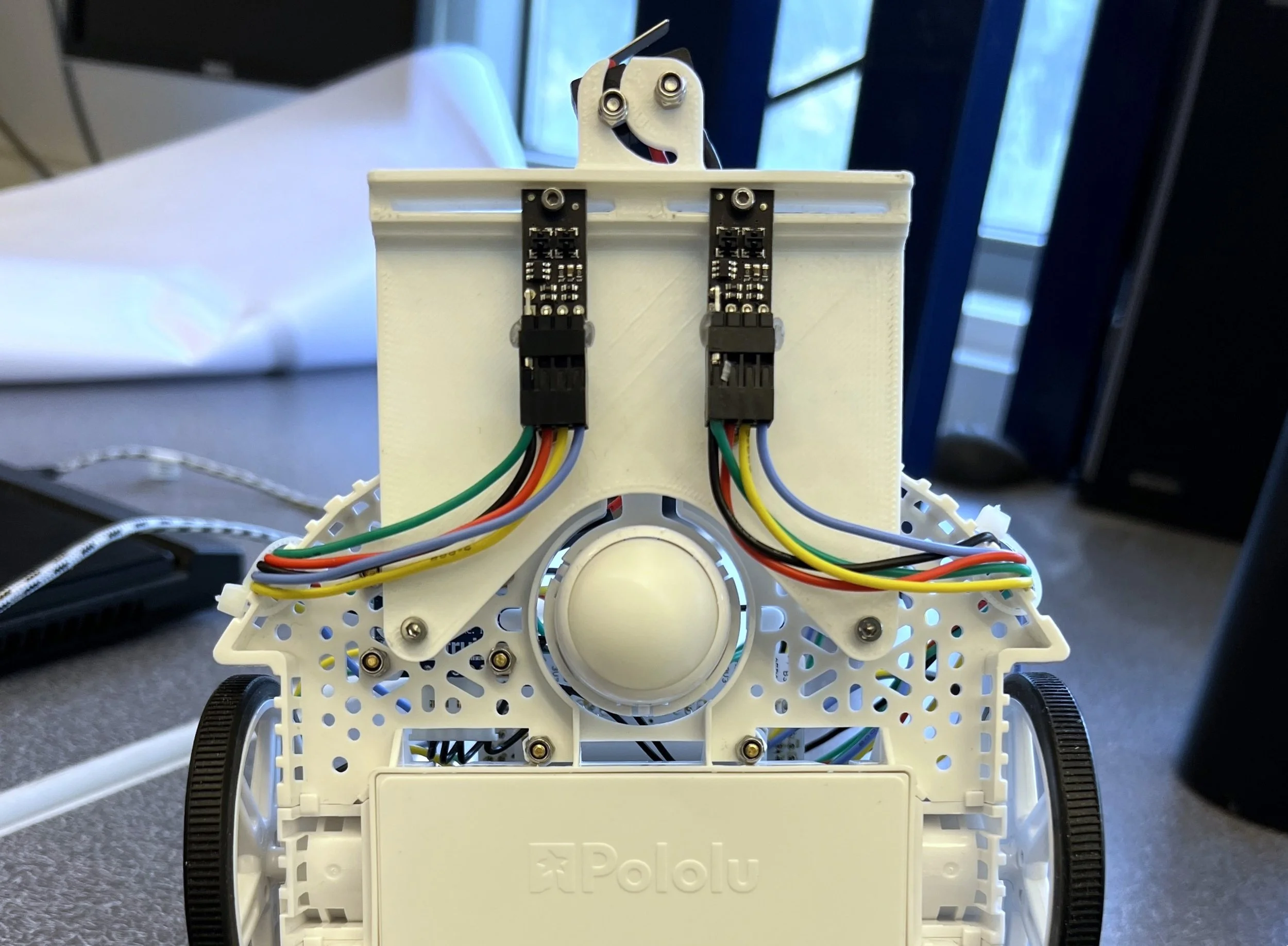
We made custom jumper wires to connect all of our electrical components as shown at the bottom of this page. The wires are color coded and easily traceable. The pin layouts for each peripheral are listed below.
Pin Layouts
Left Line Sensor
CTRL — PB14
GND — GND
VCC — PB13
Signal 1 — PA6
Signal 2 — PA7
Left Encoder
Signal A — PB4
Signal B — PB5
Right Line Sensor
CTRL — PB12
GND — GND
VCC — PB11
Signal 1 — PC2
Signal 2 — PC3
Left Motor
Effort — PA9
Direction — PC7
Enable — PA10
IMU
Vin — +5V
GND — GND
SDA — PB9
SLC — PB8
Bump Sensor
Black — 3V3
Green — PC0
Right Encoder
Signal A — PA0
Signal B — PA1
Right Motor
Effort — PB0
Direction — PB7
Enable — PC1